
インピーダンス制御(Impedance Control)は、主にロボット工学や制御工学の分野で使われる力と動き(位置・速度)の関係性を制御する手法です。従来の位置制御とは異なり、外力が加わったときの「柔らかさ」や「しなやかさ」を調整できるのが特徴です。
🔧 インピーダンス制御とは?
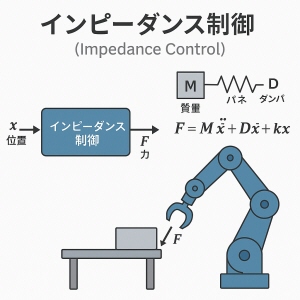
物理的な「バネ-ダンパ-質量系」(Mass-Spring-Damper system)を模倣して、ロボットの力と位置の関係を制御する方法です。
数式モデル(1自由度の場合):
F=Mx¨+Dx˙+KxF = M\ddot{x} + D\dot{x} + Kx
-
FF:外力
-
xx:位置(変位)
-
MM:質量(慣性)
-
DD:ダンパ係数(粘性)
-
KK:バネ定数(剛性)
この式で、インピーダンス制御は「このような力と動きの関係をロボットに持たせたい」として目標の運動を定めます。
🧠 どんなときに使うの?
✅ 用途例
-
ロボットアームが人と安全に接触する必要があるとき(例:介護ロボット)
-
外界との力の相互作用を適切に制御したいとき(例:組立作業、表面研磨)
-
柔軟な動きや受動的な力の吸収が求められるタスク
🚩 従来の制御との違い
| 制御方式 | 特徴 |
|---|---|
| 位置制御 | 指定した位置に正確に移動(硬い動き) |
| 力制御 | 指定した力を維持(不安定になりやすい) |
| インピーダンス制御 | 力と位置の「関係性」を制御(柔軟な応答が可能) |
🔄 インピーダンス vs アドミタンス制御
| 特徴 | インピーダンス制御 | アドミタンス制御 |
|---|---|---|
| 入力 | 位置(速度、加速度) | 力(トルク) |
| 出力 | 力 | 位置(速度) |
| 適用先 | 軽量・高剛性のアクチュエータに向く | 重量のあるロボットに向く |
💡 応用例
-
協働ロボット(協調作業)
-
人間と接触するリハビリロボット
-
精密な接触が必要な医療ロボット
-
力触覚フィードバック付きの遠隔操作(テレオペレーション)
| <トップページ> |