
ロボット制御工学(robot control engineering)は、ロボットが目標とする動作を正確かつ安定して実行できるようにするための技術と理論を扱う工学分野です。主に次のような要素から成り立っています:
■ 基本構成
-
センサ系
-
ロボットが周囲の環境や自分の状態(位置、速度、力など)を認識するためのセンサ(エンコーダ、加速度計、力センサ、カメラなど)。
-
-
アクチュエータ系
-
ロボットの関節やエンドエフェクタを駆動する装置(モータ、油圧シリンダ、空気圧アクチュエータなど)。
-
-
制御アルゴリズム
-
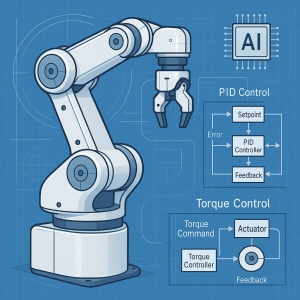
ロボットの目標動作を実現するための制御則。PID制御、状態フィードバック制御、適応制御、最適制御、ロバスト制御、モデル予測制御(MPC)などが使われます。
-
■ ロボット制御の種類
| 種類 | 説明 |
|---|---|
| 位置制御 | 指定された位置にロボットのリンクやエンドエフェクタを動かす制御(最も基本) |
| 速度制御 | 指定された速度で動かす(搬送ロボットなどで重要) |
| トルク制御 | 関節やアクチュエータの出力トルクを制御(より柔軟な制御が可能) |
| 力制御 | ロボットが対象物に加える力を制御(協働ロボットや作業ロボット) |
| インピーダンス制御 | 力と位置の両方をバランスさせて、柔らかい動きを実現 |
| 軌道制御(Trajectory Control) | 時間的に変化する目標位置や速度に追従する制御 |
■ 関連分野・技術
-
逆運動学(Inverse Kinematics)
-
目標の手先位置から関節角を計算する。
-
-
運動方程式(Dynamics)
-
ニュートン-オイラー法、ラグランジュ法などでロボットの動的モデルを導出。
-
-
フィードバック制御とフィードフォワード制御
-
センサで得た情報を用いて誤差を修正する。
-
-
協調制御・群制御
-
複数ロボットの協調動作(例:ドローン群、搬送ロボット群)。
-
■ 応用例
-
産業用ロボット(溶接、組立、搬送)
-
サービスロボット(案内、清掃)
-
医療ロボット(手術支援)
-
自律移動ロボット(AGV、AMR)
-
ヒューマノイド・アンドロイド
■ 学ぶべき数学・物理
-
線形代数(行列、座標変換)
-
微積分・常微分方程式
-
動力学(ラグランジュ、ニュートン)
-
制御工学(伝達関数、状態空間モデル)
| <トップページ> |